Keywords
| system characteristics | problems | solutions |
|---|---|---|
| -hydraulic system -time-varying parameters and disturbances -mismatched and matched disturbances | -position tracking performance -time-varying parameters and disturbances | -adaptive technique -adaptive full-state prescribed performance position tracking |
The Problem
Nature of the problem
- It’s a stability and position tracking performance problem
In what context is it studied
- It’s studied in the context of hydraulic systems
What does it entail
- unknown time-varying parameters and disturbances
The problem of how to cope with both unknown time-varying parameters and time-varying disturbances is still, then, a challenge for hydraulic systems.
The Goal
- Improve the robustness of hydraulic system controllers
improve robustness against both unknown disturbances and parametric uncertainties
The Goal
an adaptive…controller…in which both the transient and steady performance of all the control errors can be prescribed.
The Previous Methods Applied
The Previous Methods Applied are
- output-feedback nonlinear robust control with an
- extended state observer (ESO)
- finite-time sliding mode state observer (SMO)
- adaptive robust control
- single ESO-based
- two-ESO-based
- utilized to estimate both the unmeasured velocity value and unknown disturbances
- output-feedback-based adaptive-gain super-twisting sliding mode control framework
- combined ESO and a prescribed performance function (PPF)
- combined Barrier Lyapunov Function and the PPF
- adaptive prescribed performance backstepping controller
What these methods lack
Remarkably, the designs of all the above controllers neglected to account for the large parametric uncertainties which result from component wear and temperature change in hydraulic systems, the existence of which can worsen control performance and even cause systems to be destabilized.
these adaptive controllers always assumed that unknown parameters existing in hydraulic systems were constant
The Developed Method
The Developed Method
To address this issue, this article proposes an adaptive full-state prescribed performance position tracking control for hydraulic systems subject both to unknown time-varying parameters and to mismatched and matched disturbances.
System Modeling
- The considered hydraulic system is hereby illustrated, in which it can be seen that the valve-controlled hydraulic axis causes the load to move.
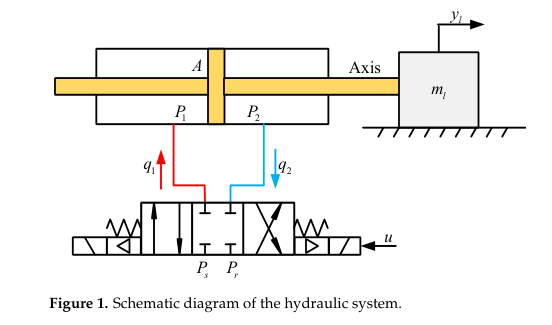
- The dynamics of the load can be denoted as
| Symbol | Signification |
|---|---|
| load mass | |
| displacement | |
| pressure values of the two chambers | |
| effective piston area | |
| viscous friction coefficient | |
| Coulomb friction coefficient | |
| Strikebeck effect coefficient | |
| Shape coefficients | |
| unknown mismatched disturbance |
- The pressure dynamics of the hydraulic actuator can be denoted as
| Symbol | Signification |
|---|---|
| chamber i volume | |
| initial chamber volume | |
| effective oil bulk modulus | |
| time-varying internal leakage coefficient; | |
| supplied flow rate | |
| return flow rate | |
| unknown uncertainties |
Metadata
| Title | Data |
|---|---|
| Authors | - Junqiang Shi - Xiaowei Yang - Jinjun Wu - Jingcheng Gao |
| Date of publication | 12 July 2025 |
| Citation | Shi, J.; Yang, X.; Wu, J.; Gao, J. An Adaptive Prescribed Performance Position Tracking Controller for Hydraulic Systems. Mathematics 2025, 13, 2258. https://doi.org/10.3390/math13142258 |