Pre-Choice
| Order | № | Thème |
|---|---|---|
| 1 | 24 | Etude et développement d’une solution de commande programmable décentralisée de l’unité de tri de pièces sous environnement Factory IO |
| 2 | 22 | Contrôleur PID réglé par réseau de neurones |
| 3 | 34 | Commande intelligente d’un accélérateur d’un véhicule électrique |
| 4 | 16 | Conception et réalisation d’un système intelligent pour modéliser les machines électriques |
Choice
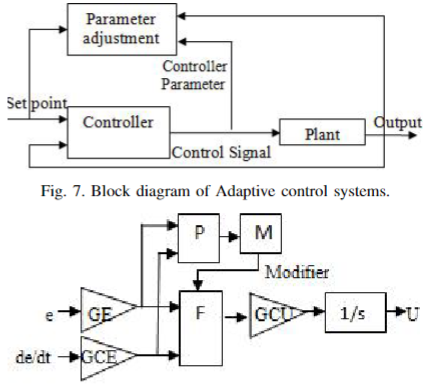
15/02/2026 №22: Contrôleur PID réglé par résau de neurones Encadrante: Mme Amoura
Key points
- start with a regular PID
- PID parameters should be regulated with a neural network
- neural network will have one hidden layer
- move towards a fractional PID (FOPID)
- compare the performance of PID, optimal PID, FOPID, PID with neural network
- use matlab r2021
References to check out
- Charef, A. (2006). Analogue realisation of fractional-order integrator, differentiator and fractional PID controller. IET Control Theory & Applications, 153(6), 714–722.
- Monje, C. A., Chen, Y., Vinagre, B. M., Xue, D., & Feliu, V. (2010). Fractional-order Systems and Controls : Fundamentals and Applications. Springer.
- Valério, D., & Sá da Costa, J. (2013). An Introduction to Fractional Control. IET
- Monje, C. A., Chen, Y., Vinagre, B. M., Xue, D., & Feliu, V. (2010). Fractional-order Systems and Controls : Fundamentals and Applications. Springer.
- Zhao, C., Xue, D., & Chen, Y. Q. (2005). A Fractional Order PID Tuning Algorithm for a Class of Fractional Order Plants. In International Conference on Mechatronics and Automation (pp. 216-221). Niagara, Canada.
- Liu, L., Wang, Z., & Zhang, H. (2017). A multi-objective optimization method for fractional order PID controller based on robustness and performance indices. ISA Transactions, 72, 256–267.
Previous work notes & understanding
Optimal Fractional Order PID Controller for Speed Control of Electric Vehicle (ACO)
File
Outline
-
Objective: Control the speed of an EV
-
Method: Using a Fractional Order PID controller tuned through Ant Colony Optimization (ACO)
-
Results: Superior performance over a classic PID an an Optimal PID
Breakdown
-
Section 1 introduces the concept of EVs briefly, lists previous approaches used to regulate EV speed, presents the method studied and outlines the paper’s structure.
-
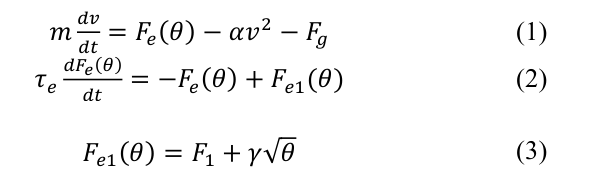
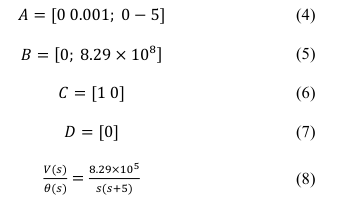
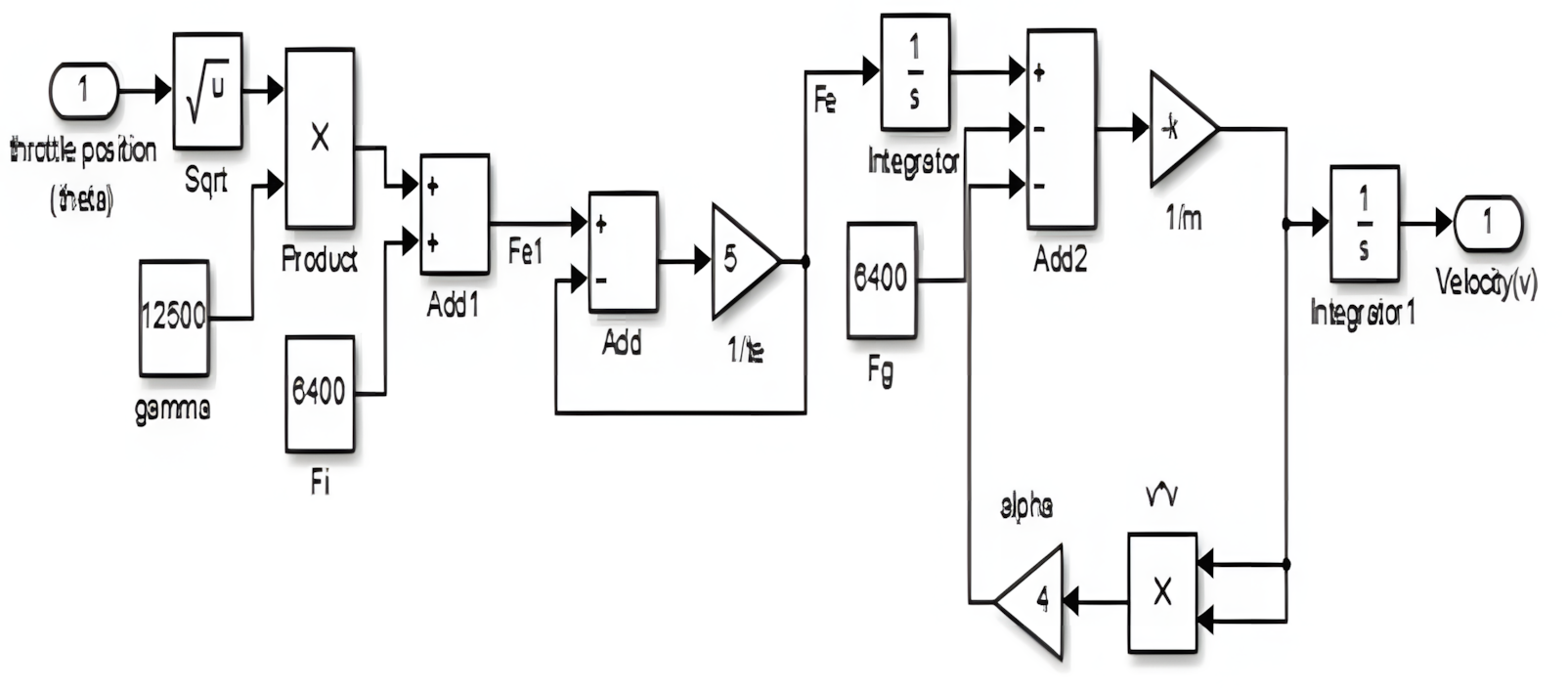
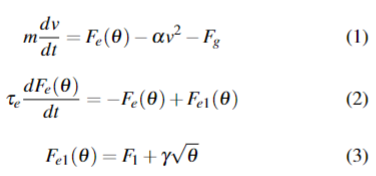
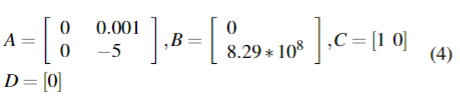
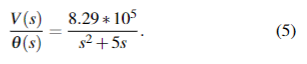
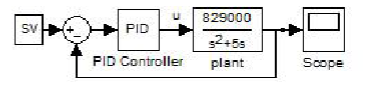
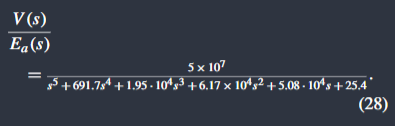
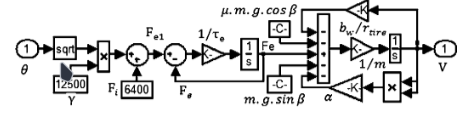
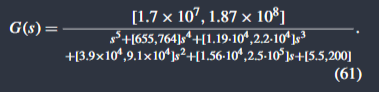
Section 2 models the EV’s dynamics, gives the state space representation, transfer function and the Simulink model.
-
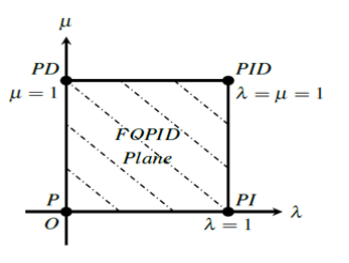
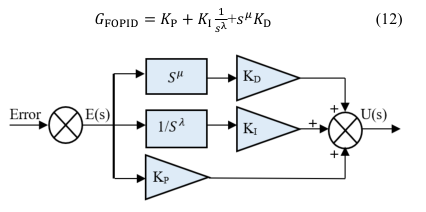
Section 3 briefly explains the PID controller the, introduces the notion of Fractional Order Controllers, lists the four types then focuses on the FOPID. It gives a brief background on fractional Calculus then explains the expression of the differintegral and the fractional differintegral. It ends with the equation and structure of the FOPID.
-
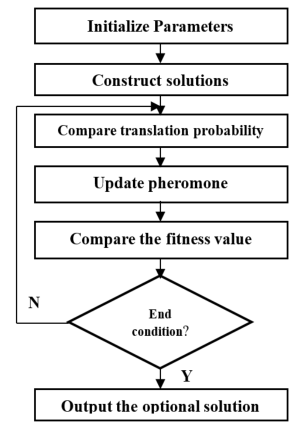
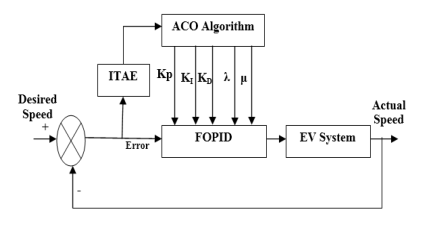
Section 4 gives a detailed explanation of the theory behind Ant Colony Optimization, it then outlines its implementation step by step. It ends with the complete system and controller diagram.
-
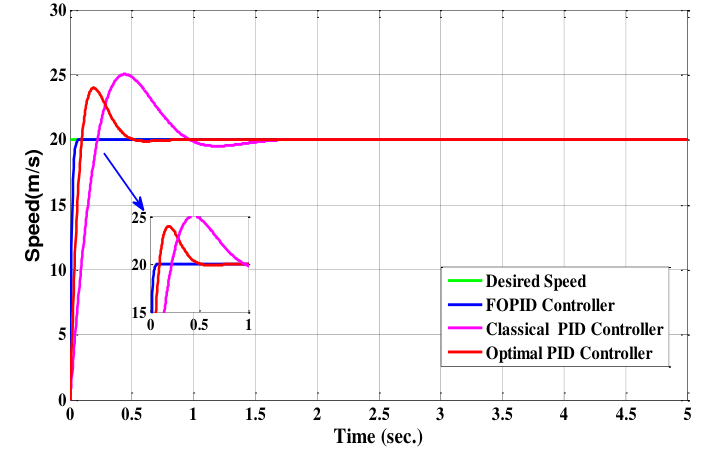
Section 5 shows simulation results in Matlab where the developed FOPID significantly outperforms both a conventional manually tuned PID and an Optimal PID. The system response graphs show the FOPID having no overshoot and an almost negligeable rise time while the other PIDs both have overshoot and a significant settling time.
-
Section 6 recapitulates the proposed solution, simulation results with digestible. numbers and affirms the benefits of the FOPID. It suggests further improvements like neural networks
Optimal Speed Control of Hybrid Electric Vehicles (LQR)
File
Outline
-
Objective: Control the speed of an EV
-
Method: Using an Optimal LQR controller
-
Results: Superior performance over PID, OBC, SOC, and FLC
Breakdown
this project uses the exact same EV representation and numbers
-
Section 01 introduces the concept of EVs and HEVs and their role in lowering global emissions, it then sets the control problem and looks into previously tried solutions such as Fuzzy Logic Control, LQR Control and other techniques. It ends by setting the goal of finding the superior controller for this application.
-
Section 2 models the EV’s dynamics, gives the state space representation, transfer function and the Simulink model. It ends by listing the controllers studied below.

-
Section 03 analyses the open loop stability of the system then deduces the controllability and observability characteristics.
-
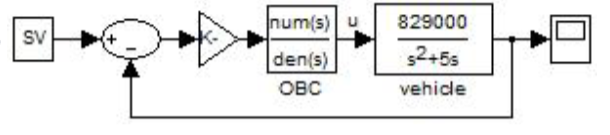
Section 04 gives the transfer function of the PID controller, briefly citing it’s parameters then gives the Simulink model with the PID controller.
-
Section 05 is divided into three subsections each explaining a type of state feedback based control pole placement:
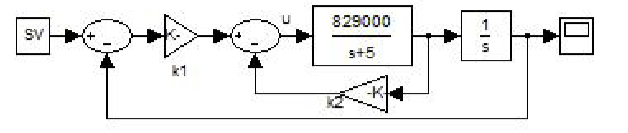 Observer Based Controller:
Observer Based Controller:
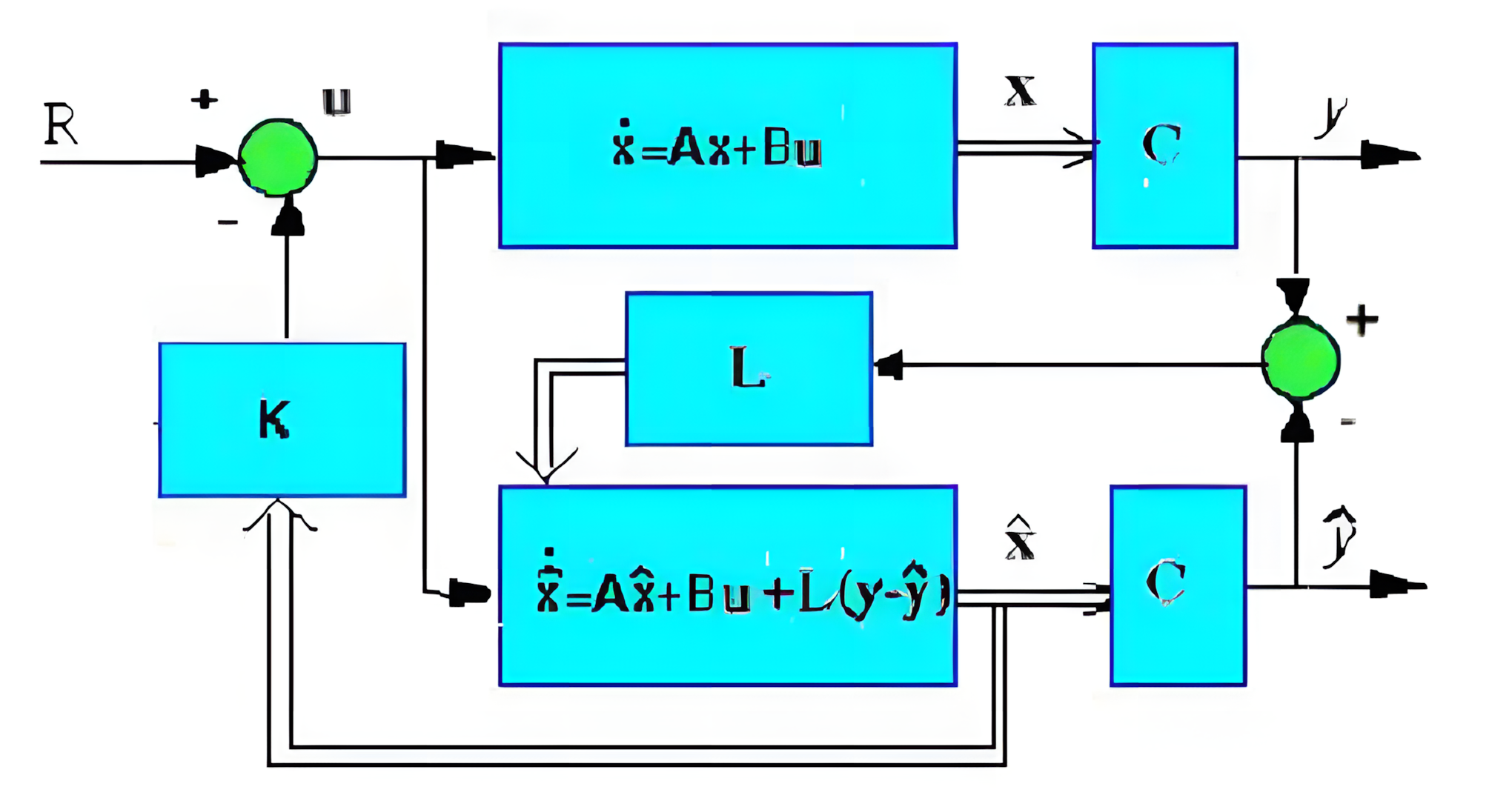
 Linear Quadratic Optimal Controller
Linear Quadratic Optimal Controller
-
Section 06 explains the concept of a Self Organizing Controller (SOC) and gives the Simulink model of an SOC
-
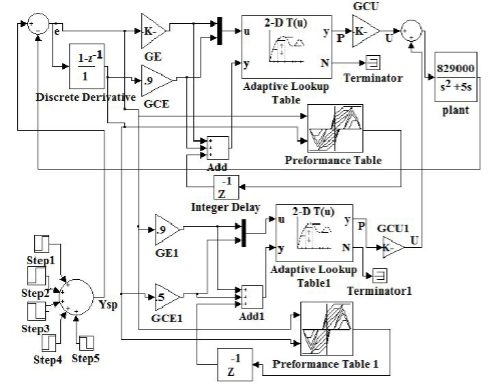
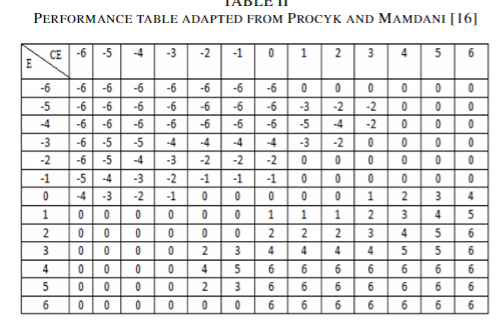
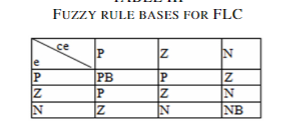
Section 07 explains in details the working of a Fuzzy Logic Controller, it gives the performance table, the fuzzy rule bases, and the block diagram of the system controller by the FLC
-
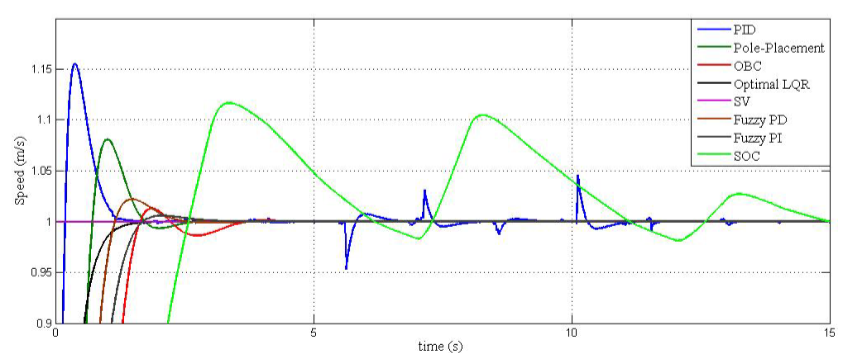
Section 08 presents simulation results and compares the open loop uncontrolled response to the closed loop responses with the different studied controllers (PID, Optimal LQR, OBC, SOC, and FLC), the results show that optimal LQR gives better performance index than the other controllers
-
Section 09 concludes from the comparative analysis that the LQR Optimal controller gives better performance compared to the other studied controllers resulting in better real life performance in terms of current, torque, and battery optimization. It suggests that Optimal LQR may be used in other areas to optimize performances.
Robust adaptive speed control of uncertain hybrid electric vehicle ( Control)
File
Outline
-
Objective: Control the speed of an EV
-
Method: Using Control
-
Results: MRAS with RM-1 is better for nonlinear HEV and the controller is more suitable for linearized HEV
Breakdown
-
Section 01 introduces the notion of EVs and HEVs emphasizing their importance for the environment, it talks about ETCS and the different ways of controlling throttle position while accounting for the non-linearities and uncertainties. It ends by proposing Control for a linearized version of the HEV and giving some background and explanations for Control.
-
Section 02 starts by explaining the architecture of an HEV and the ETCS, it gives the nonlinear mathematical model and transfer function of the ETCS, then it gives us the model of the nonlinear vehicle and its linearized form, combining the models results in the overall system model.



-
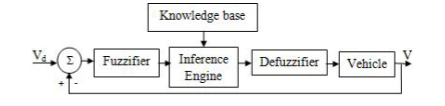
Section 03 starts with a brief presentation of the PID controller, then explains the implementation of self tuning parameters using fuzzy logic.
-
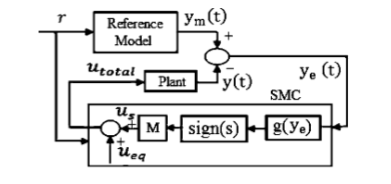
Section 04 starts with a brief explanation of Model Reference Adaptive System (MRAS), it then gives two second order reference models with different parameters. It then explains Sliding Mode Control (SMC) based on Lyapunov’s theory, it then applies SMC to the non linear system model using the linearized one for the observer

-
Section 05 presents the robust stability analysis of the linearized HEV with parametric uncertainty using the proportional controller (PC) and Kharitonov’s theorem.
- H∞ control is configured with weighting functions, the objective is to design with the desired tracking performance and robustness. here the mixed-sensitivity approach is used, the goal is to minimize the norm of the sensitivity matrix at the output.

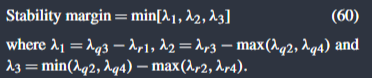
- Kharitonov’s theorem is used to determine the stability margins and conditions
of the system, therefore we can find the transfer function with parametric variation.
- Robust stability analysis we consider three cases with different ways of obtaining the gain of and apply the stability condition on each case.
- in case 1 the gain is chosen as unitary. we find that the system in unstable.
- in case 2, we derive the gain from with the root locus technique. we find the system stable with a margin of 0.139.
- in case 3, we derive the gain using Routh’s order reduction technique. we find the system stable with a margin of 0.32.
- The stability margin obtained from a robust PC, i.e., a PC designed using an H∞ controller, is far better compared to the stability margin obtained from a conventional PC
- H∞ control is configured with weighting functions, the objective is to design with the desired tracking performance and robustness. here the mixed-sensitivity approach is used, the goal is to minimize the norm of the sensitivity matrix at the output.
-
Section 06 presents the simulation results, it compares the closed loop response of the HEV with various controllers (PI, PID, STF-PID, MRAS, ) focusing on performance markers such as IAE, ISE, OS, RT and ST.
-
Section 07 concludes that the MRAS with RM-1 is better for the nonlinear HEV and the controller is more suitable for linearized HEV
Tuning of PID Controller for DC Servo Motor using Genetic Algorithm
File
Outline
-
Objective: Control the speed and position of a DC Servo Motor
-
Method: Using a PID Controller tuned through a Genetic Algorithm
-
Results: The genetic algorithm based PID tuning provides much better results compared to the conventional methods.
Breakdown
-
Section 01 introduces DC Servo Motors and the previously used control methods, mainly the conventional PI/PID and suggests improving their implementation by tuning the parameters using a Genetic Algorithm.
-
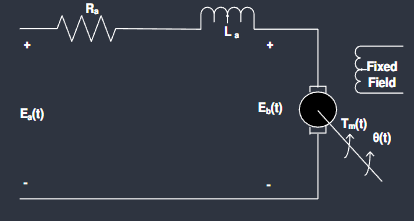
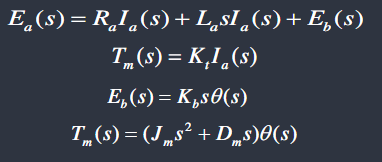
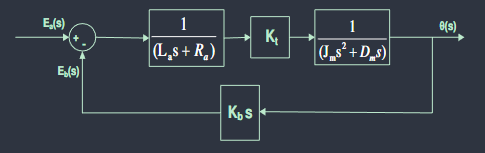
Section 02 gives a mathematical model of a DC Servo Motor

-
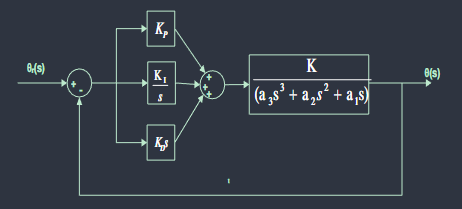
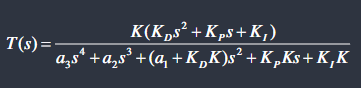
Section 03 explains the PID controller design

-
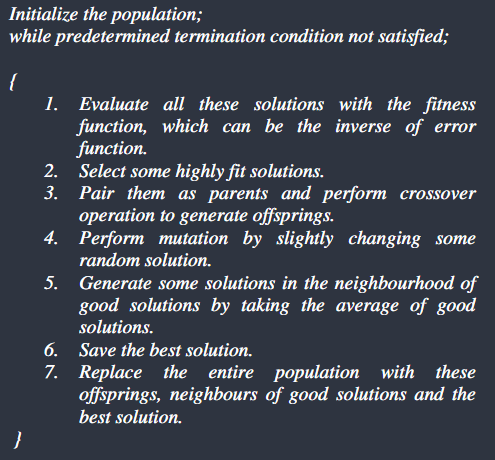
Section 04 explains in detail the working of a Genetic Algorithm
-
Section 05 explains in detail the implementation of a Genetic Algorithm in the case of the PID Controller

-
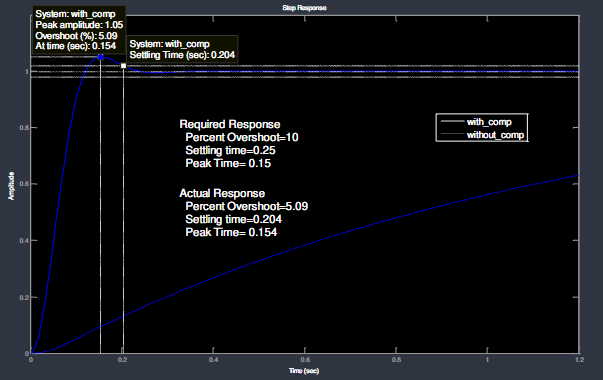
Section 06 gives the simulation results, finding that for a wide range of requirements, tuning is done and actual response is found to be better than the required response. Therefore, the gain values of the PID controller are optimized to achieve the desired response.
-
Section 07 concluded that the genetic algorithm based PID tuning provides much better results compared to the conventional methods. it suggests that the range of requirement can be widened by increasing the range of initial population to achieve a more flexible controller.
Contrôleur PID d’ordre fractionnaire basé sur la fonction idéale de Bode
File
Outline
-
Objective:
-
Method:
-
Conclusion:
Breakdown
- Chapitre 01: Simulation des systèmes d’ordre fractionnaires
- Section 01